EKF算法做机器人轨迹定位/跟踪的程序,与里程计算法进行对比,结果显示EKF算法定位/跟踪精度更高。
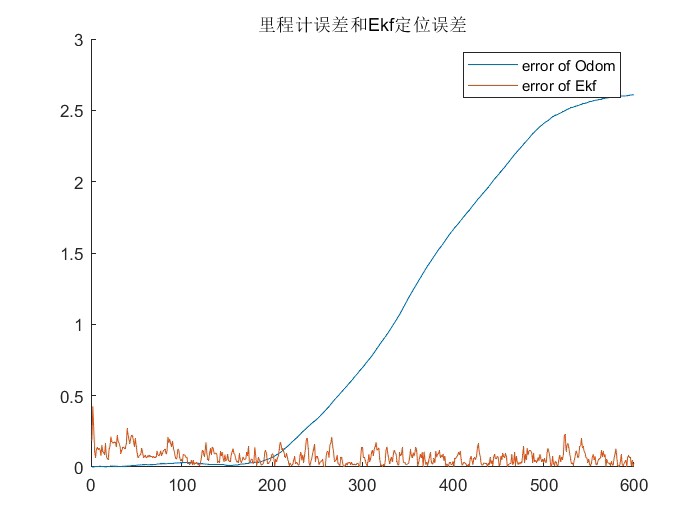
纯里程计的误差为
error_Odom_average = 1.0283
Ekf定位的误差为
error_Ekf_average = 0.071629
YID:9230745542444395 算法博士
算法博士
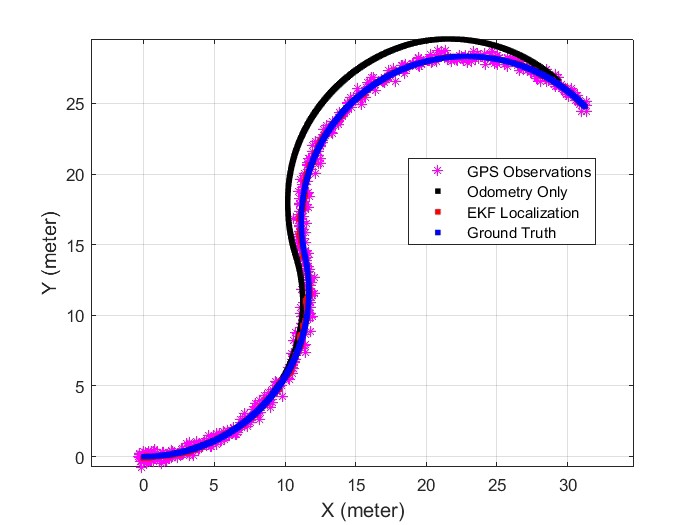
EKF算法做机器人轨迹定位/跟踪的程序,与里程计算法进行对比,结果显示EKF算法定位/跟踪精度更高。
纯里程计的误差为
error_Odom_average = 1.0283
Ekf定位的误差为
error_Ekf_average = 0.071629
YID:9230745542444395算法博士


