ADRC线性自抗扰控制感应电机矢量控制调速Matlab/Simulink仿真
1.模型简介
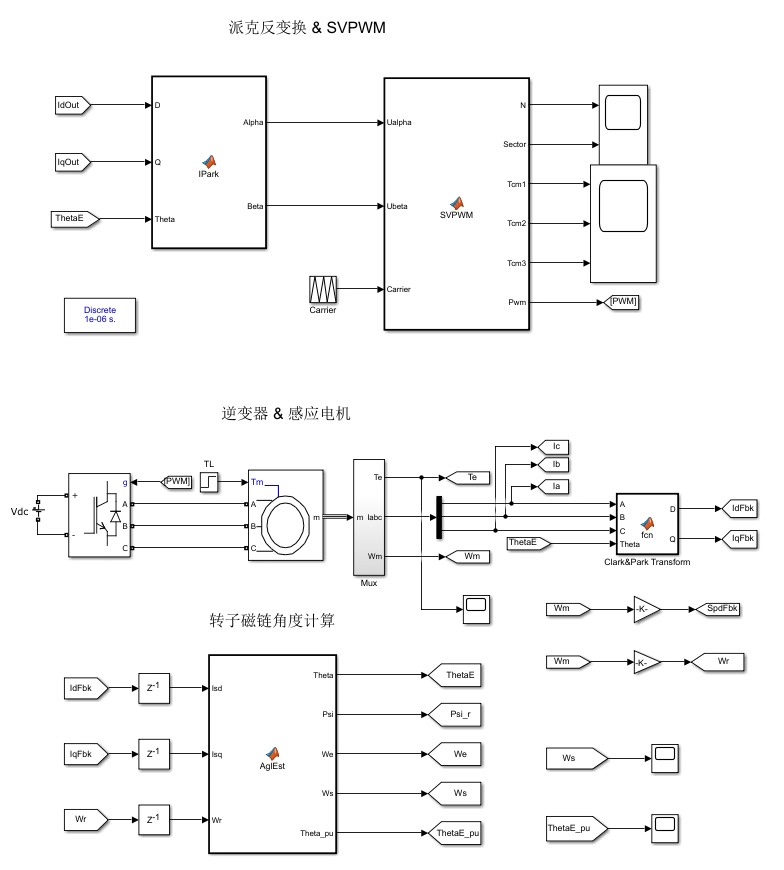
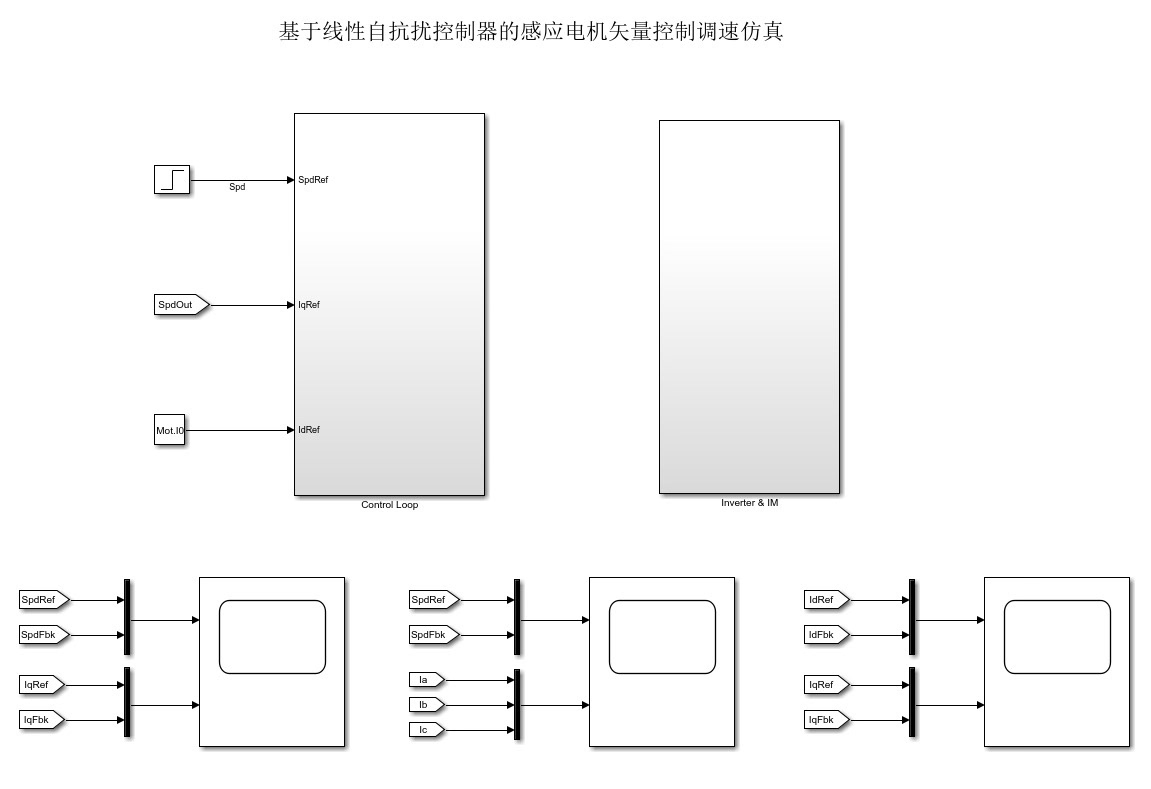
模型为基于线性自抗扰控制(LADRC)的感应(异步)电机矢量控制仿真,采用Matlab R2018a/Simulink搭建。
模型内主要包含DC直流电压源、三相逆变器、感应(异步)电机、采样模块、SVPWM、Clark、Park、Ipark、采用一阶线性自抗扰控制器的速度环和电流环等模块,其中,SVPWM、Clark、Park、Ipark、线性自抗扰控制器模块采用Matlab funtion编写,其与C语言编程较为接近,容易进行实物移植。
模型均采用离散化仿真,其效果更接近实际数字控制系统。
2.算法简介
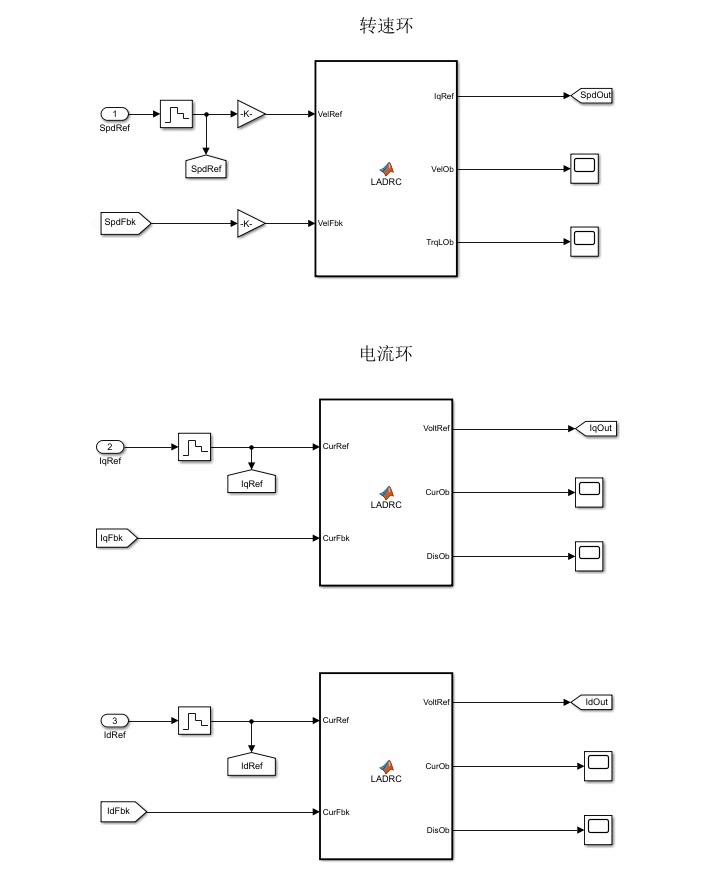
感应电机调速系统由转速环和电流环构成,均采用一阶线性自抗扰控制器。
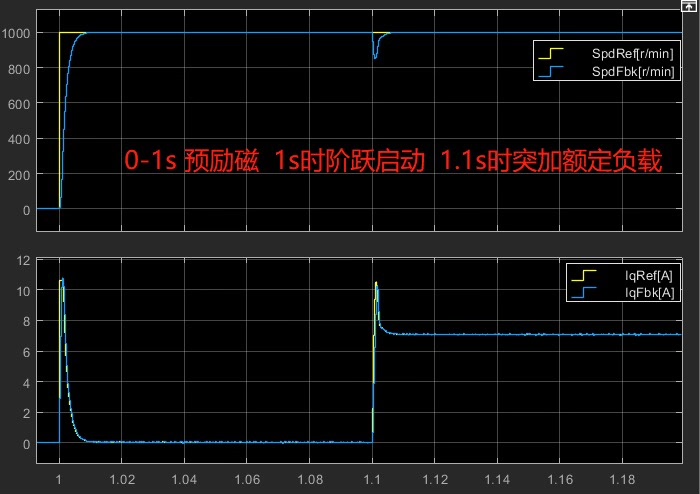
在电流环中,自抗扰控制器将电压耦合项视为扰动观测并补偿,能够实现电流环解耦;在转速环中,由于自抗扰控制器无积分环节,因此无积分饱和现象,无需抗积分饱和算法,转速阶跃响应无超调。
自抗扰控制器的快速性和抗扰性能较好,其待整定参数少,且物理意义明确,比较容易调整。
3.仿真效果
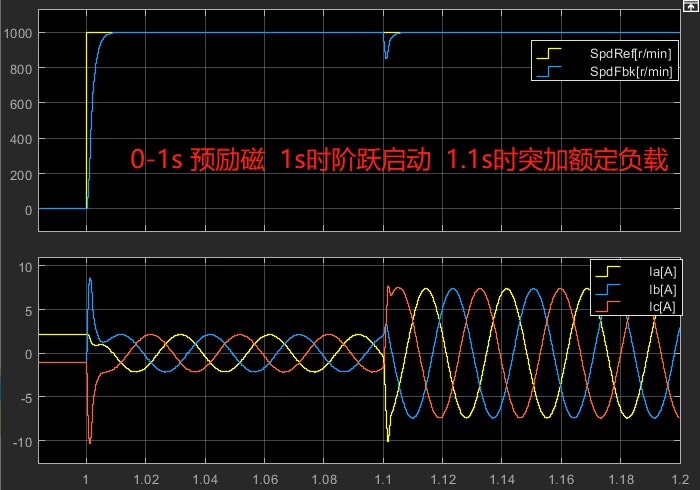
1 转速响应与转矩电流Iq响应波形 – 转速阶跃响应无超调,如下图1所示。
2 转速响应与三相电流波形,如下图2所示。
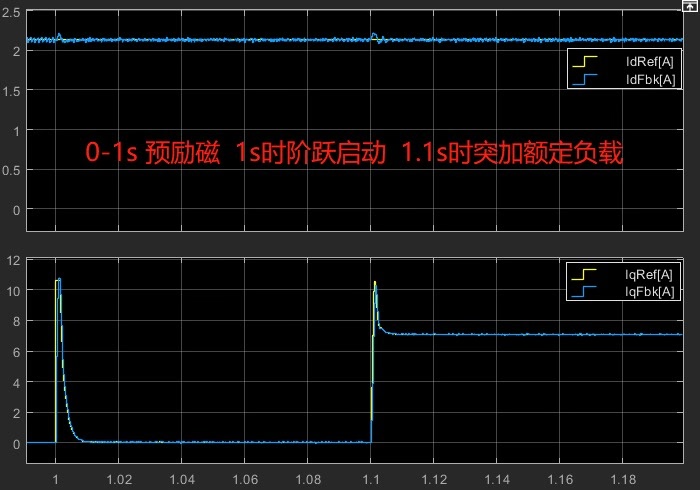
3 励磁电流Id与转矩电流Iq响应波形,如下图3所示。
4.
可提供模型内相关算法的参考文献,避免大量阅读文献浪费时间。
YID:95135703763273933 怎落笔都不对
怎落笔都不对