分布式驱动汽车稳定性控制。
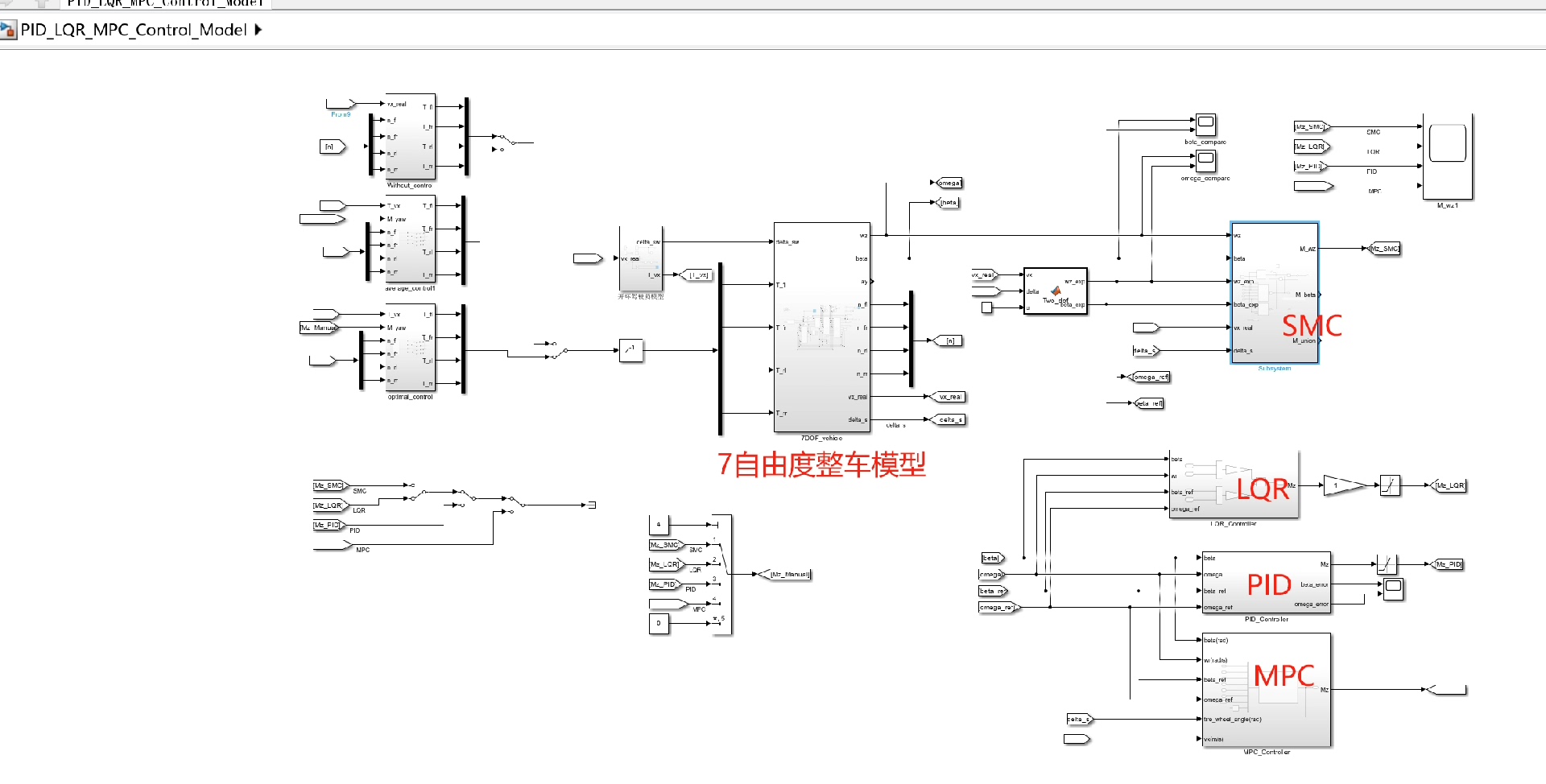
采用纯Simulink模型搭建,包括控制策略和车辆动力学模型。
采用分层式直接横摆力矩控制,上层包括模型预测MPC,滑模控制SMC,PID控制,LQR控制。
可灵活对四种控制器对比和选择。
另外下层基于轮胎滑移率最优分配。
四种控制均可跟踪横摆角速度和质心侧偏角期望值。
车辆被控对象采用七自由度整车模型输出实际质心侧偏角和横摆角速度,二自由度模型输出理想质心侧偏角和横摆角速度。
具有初始化文件,Simulink模型,控制器说明,有参考文献和七自由度整车建模说明文档。
默认采用MATLAB2021a版本,另外提供了比较旧的2016a版本模型。
模型用来学习建模和分布式控制驱动思路。
YID:5810779509481701 tbNick_tyzxw
tbNick_tyzxw