Carsim Simulink联合仿真-基于LQR/模糊PID/滑模控制的横摆稳定性控制系统 综合跟随理想横摆角速度的方法和抑制汽车质心侧偏角的汽车稳定性控制方法,以线性二自由度车辆操纵特性模型为控制目标,基于汽车横摆力矩与车辆状态偏差之间的动力学关系建立了控制系统模型。
速度跟踪模块使用前馈加反馈的PID控制架构。
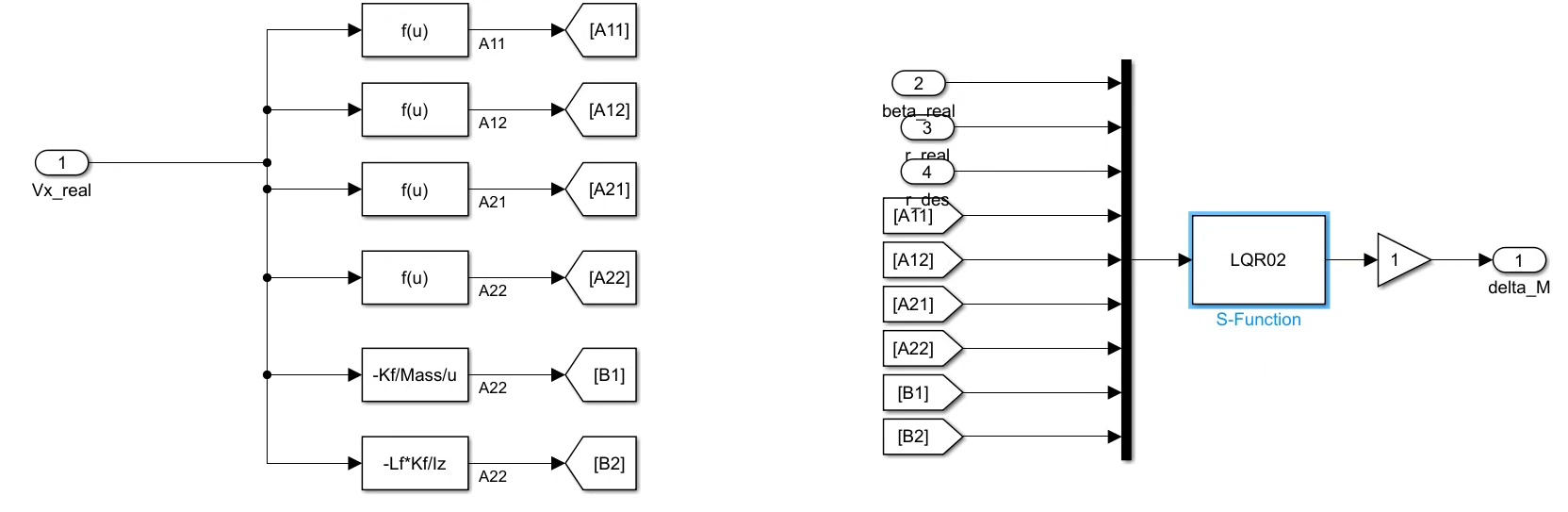
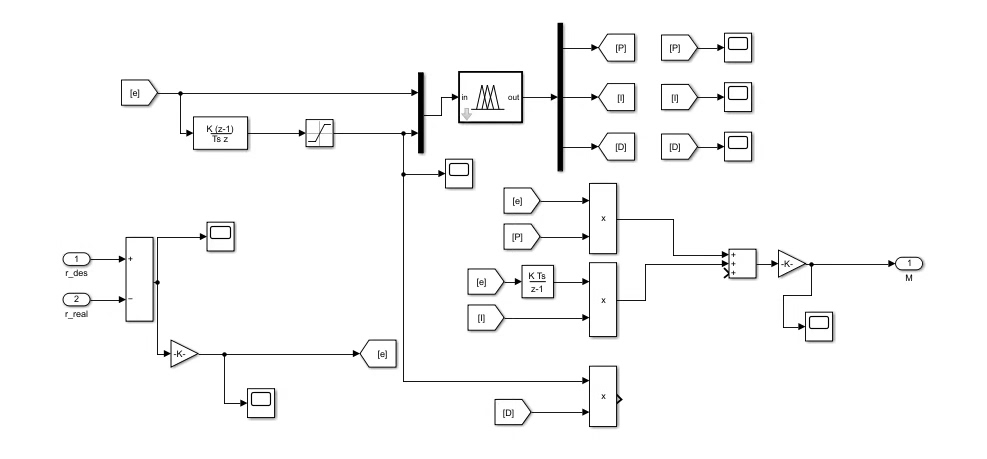
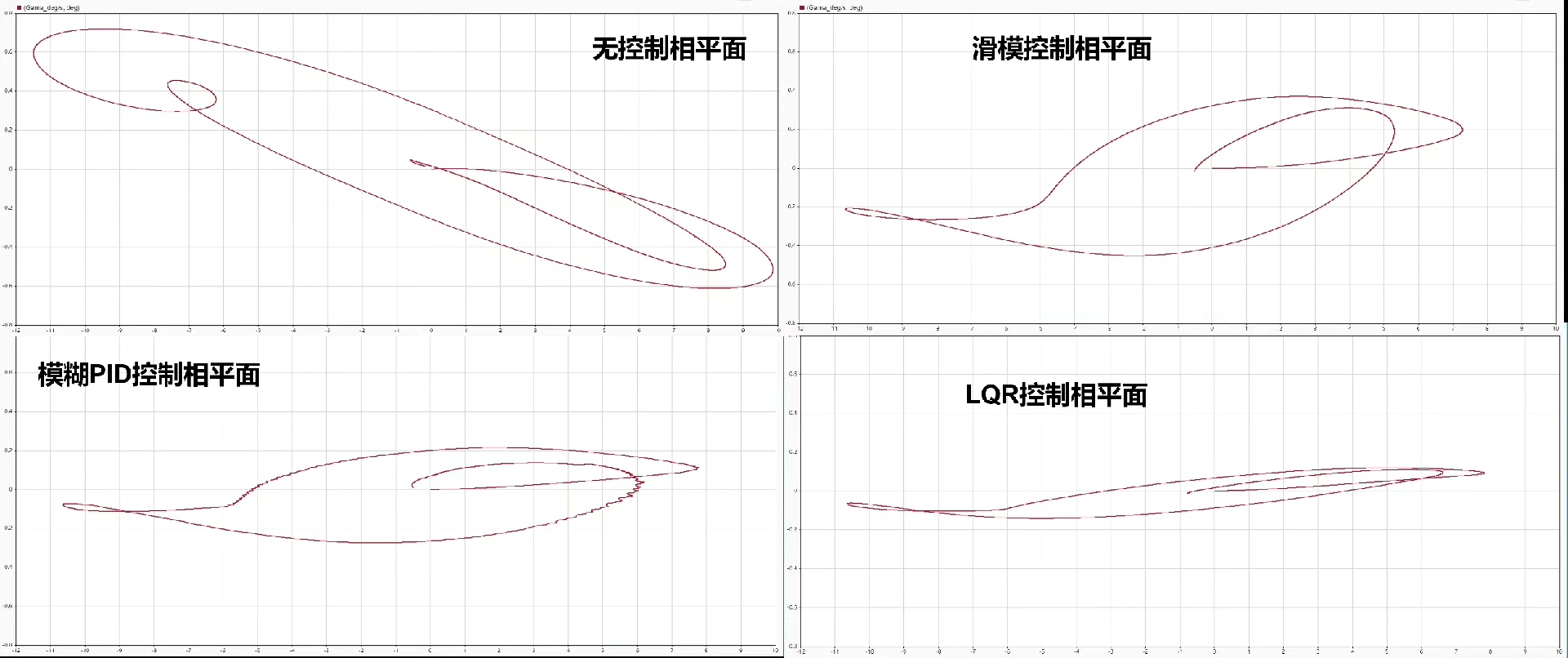
上层第一种方案采用线性二次型调节器(LQR)方法进行了汽车横摆力矩的决策,综合跟踪期望横摆角速度和抑制质心侧偏角;第二种方案采用模糊PID控制,以理想和实际横摆角速度的差值作为输入,输出附加横摆力矩;第三种方案采用滑模控制方法得到附加横摆力矩。
下层才用基于规则和基于二次规划的转矩分配方法对速度跟踪模块输出的需求总力矩和横摆力矩控制模块输出的横摆力矩进行分配,实现汽车稳定性控制。
文档详实,代码规范
YID:3348756745131243 泰若星刻苦的芥兰
泰若星刻苦的芥兰