基于MPC模型预测控制的路径跟踪控制,通过设置路径函数或者以点的形式设置路径,五次多项式路径,双移线路径,sin曲线路径都有,可在S函数内随意切换,同时加入了前轮侧偏角约束,可以完美运行!
包括:模型,参考文档,仿真调试视频,只要安装好软件16carsim和16bmatlab,就可以按照视频调试
YID:3250618406231996 琅琊双子座灯草
琅琊双子座灯草
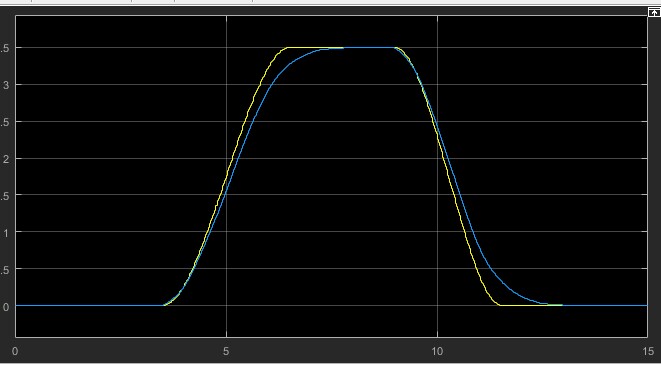
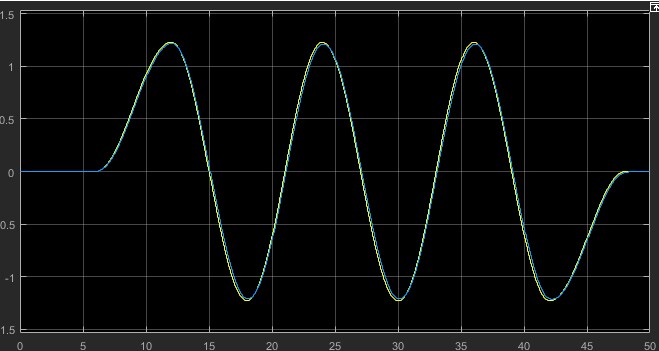
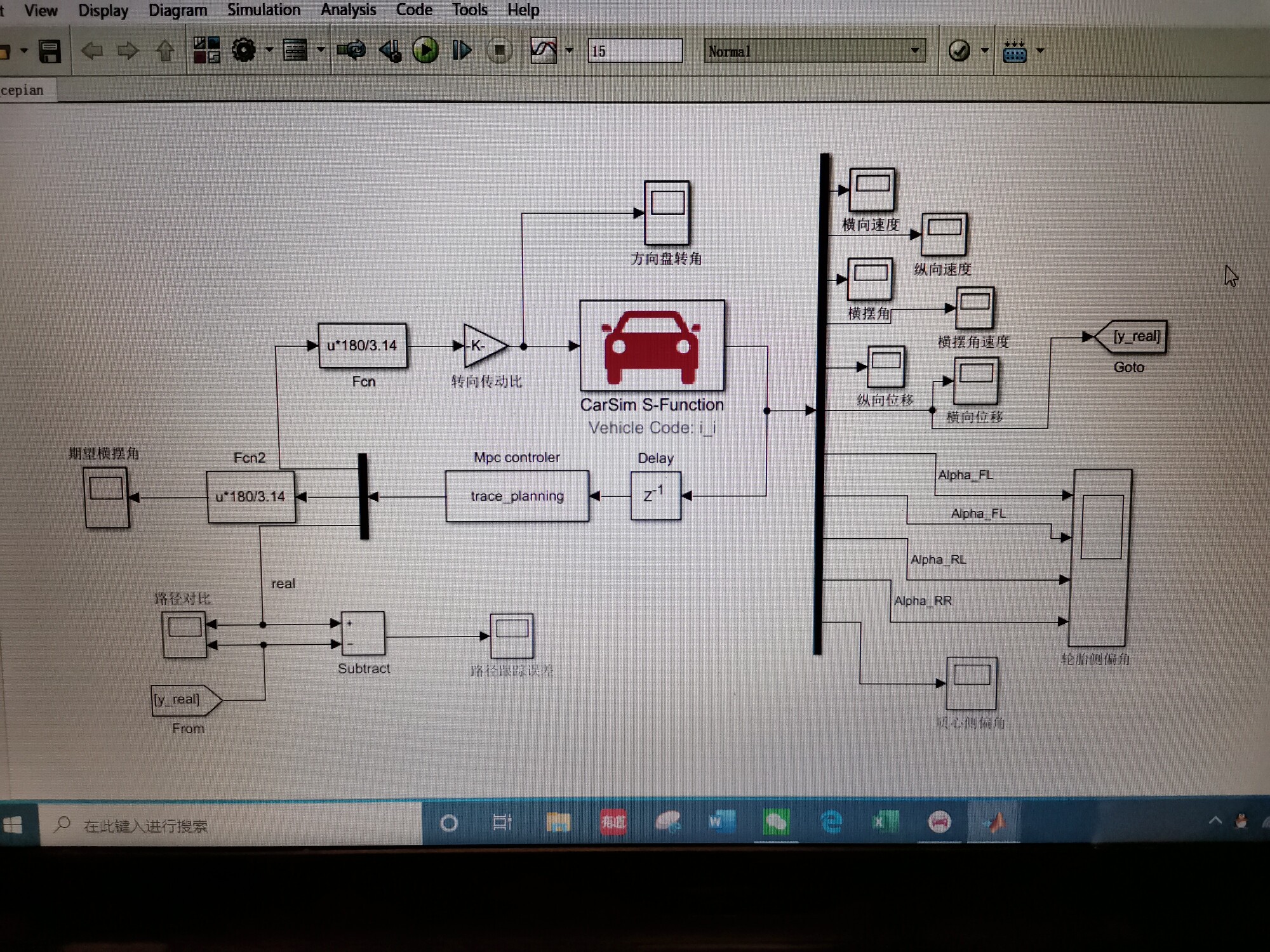
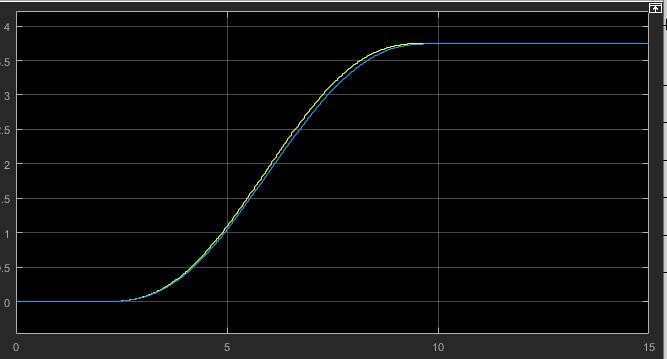
基于MPC模型预测控制的路径跟踪控制,通过设置路径函数或者以点的形式设置路径,五次多项式路径,双移线路径,sin曲线路径都有,可在S函数内随意切换,同时加入了前轮侧偏角约束,可以完美运行!
包括:模型,参考文档,仿真调试视频,只要安装好软件16carsim和16bmatlab,就可以按照视频调试
YID:3250618406231996琅琊双子座灯草


