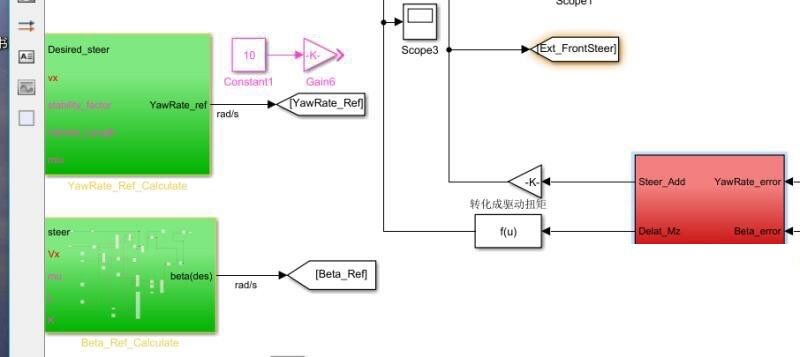
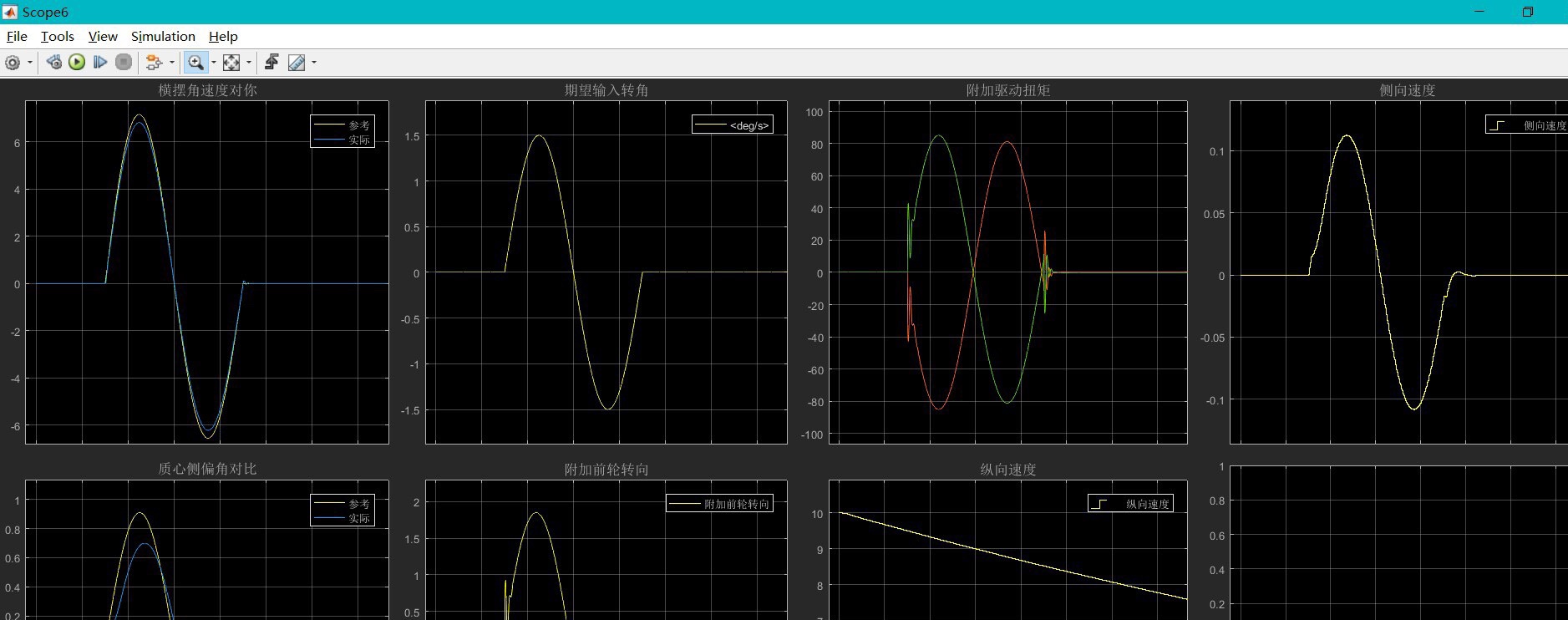
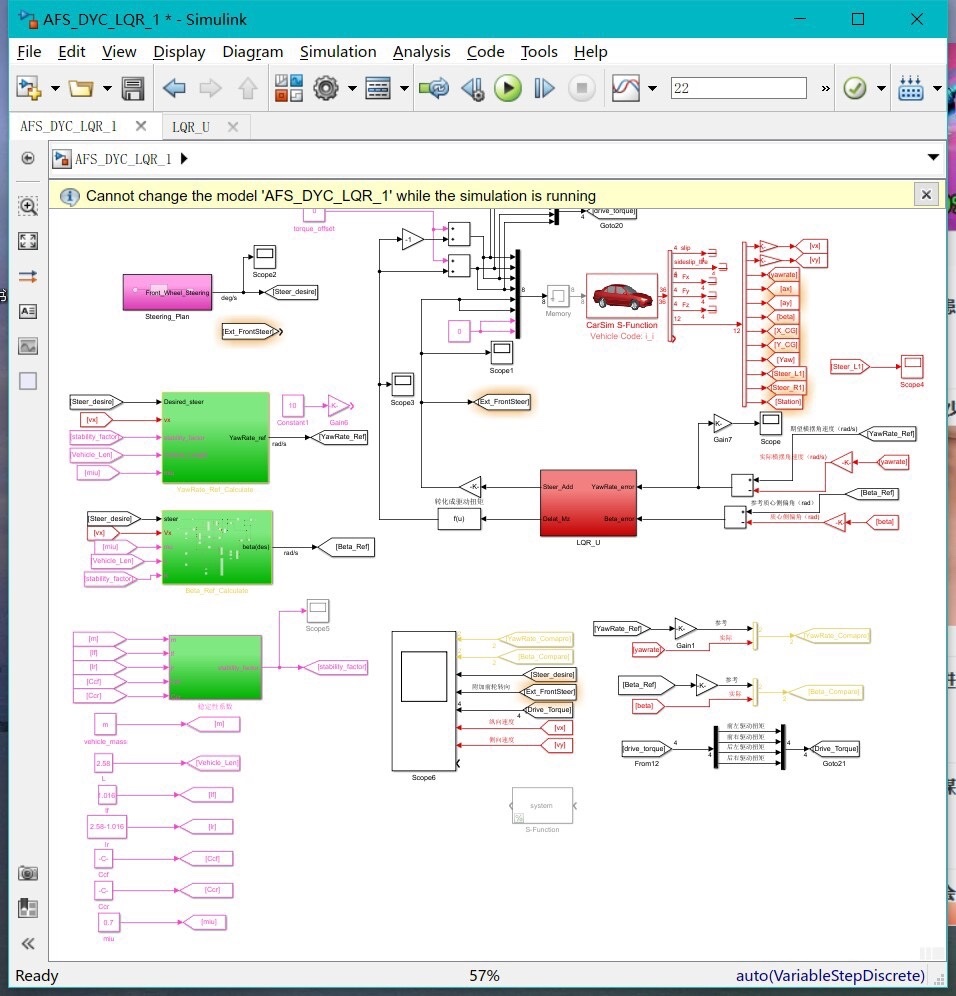
四轮独立驱动横摆角速度控制,LQR 基于LQR算法的 基于二自由度动力学方程,通过主动转向afs和直接横摆力矩dyc实现的横摆角速度跟踪 ,模型包括期望横摆角速度,质心侧偏角,稳定性因素,lqr模块等模块,作为lqr入门强烈推荐。
还有详细的lqr资料说明,可以作为基本模板,和其他算法(mpc smc)做对比等
YID:92100682395427922 想剁手书屋14
想剁手书屋14
四轮独立驱动横摆角速度控制,LQR 基于LQR算法的 基于二自由度动力学方程,通过主动转向afs和直接横摆力矩dyc实现的横摆角速度跟踪 ,模型包括期望横摆角速度,质心侧偏角,稳定性因素,lqr模块等模块,作为lqr入门强烈推荐。
还有详细的lqr资料说明,可以作为基本模板,和其他算法(mpc smc)做对比等
YID:92100682395427922想剁手书屋14


