CACC 协同式自适应巡航模型(仿真软件版本:Carsim2016,Matlab2018b及以上)
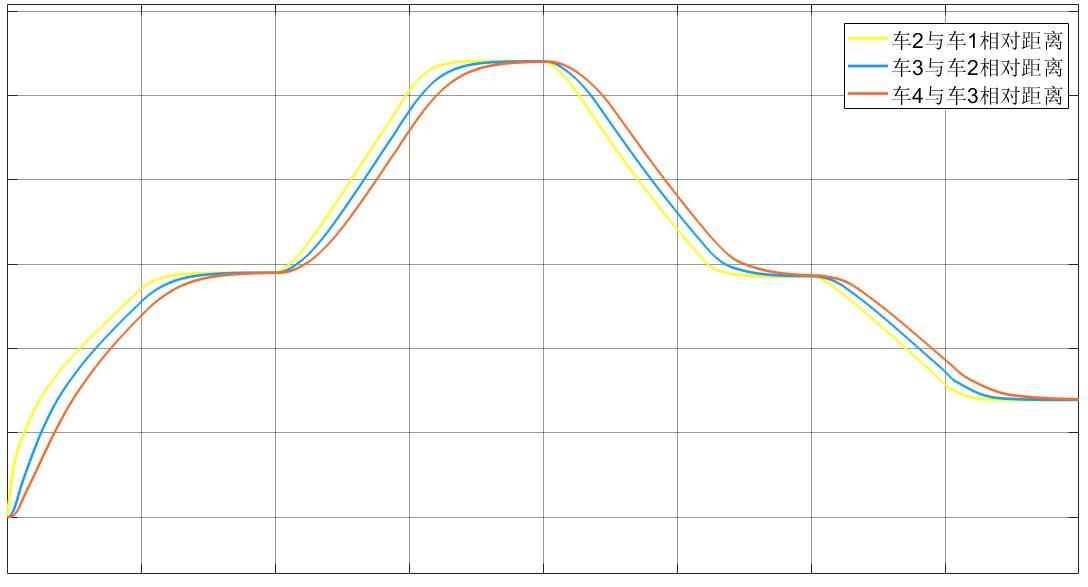
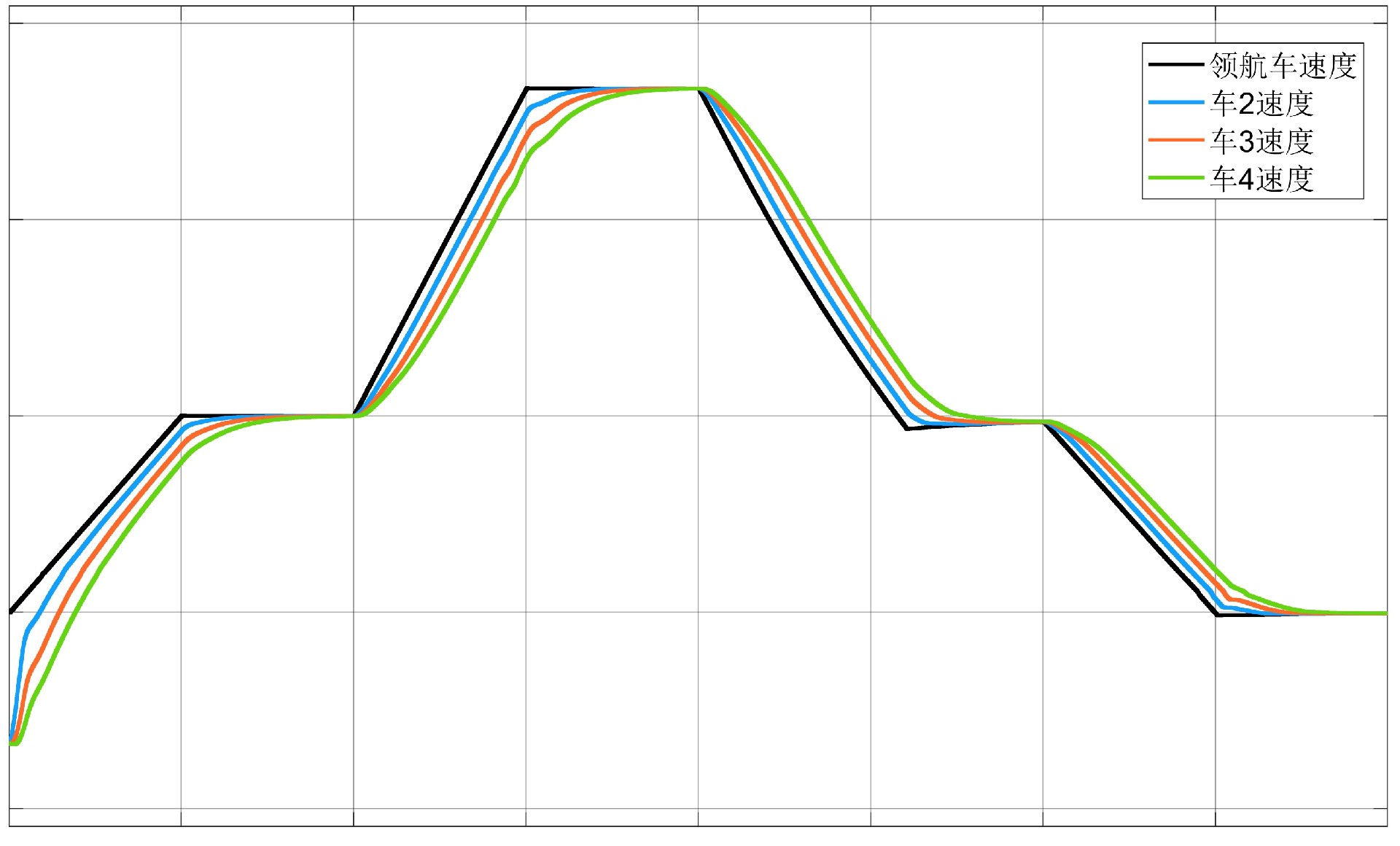
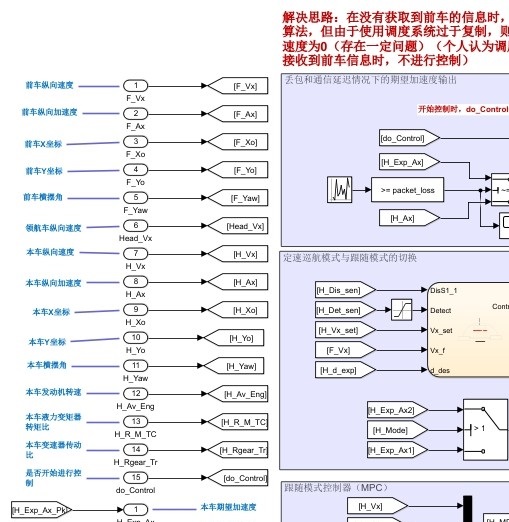
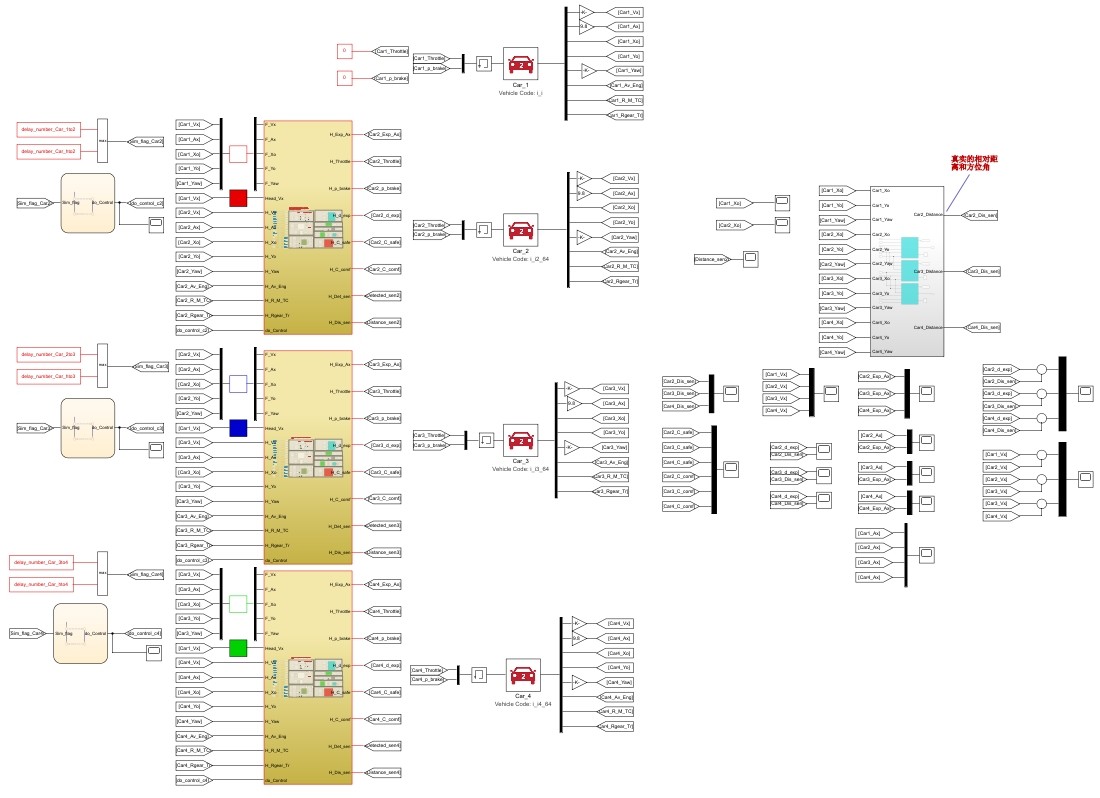
搭建四辆车在carsim和simulink进行协同式自适应巡航,其中间距策略考虑领航车速的影响,各个车辆采用分层式控制,分层式控制器主要分为下层控制(使用车辆逆纵向动力学模型(包括逆发动机模型 ))和上层控制(模糊MPC算法对相对距离,相对速度,加速度等进行调节,其中模糊逻辑对MPC的权重系数进行在线调整,stateflow进行模式切换),实现定速巡航和车队跟随工况。
?模型为本人亲自搭建,附带详细学习资料,适合入门自适应巡航,协同式自适应巡航,自动驾驶纵向控制,同时学习模型预测控制算法和模糊推理方法。
YID:96320688633031253 二斤青柿子
二斤青柿子