基于改进A*算法融合DWA算法的机器人路径规划MATLAB仿真程序(含注释)
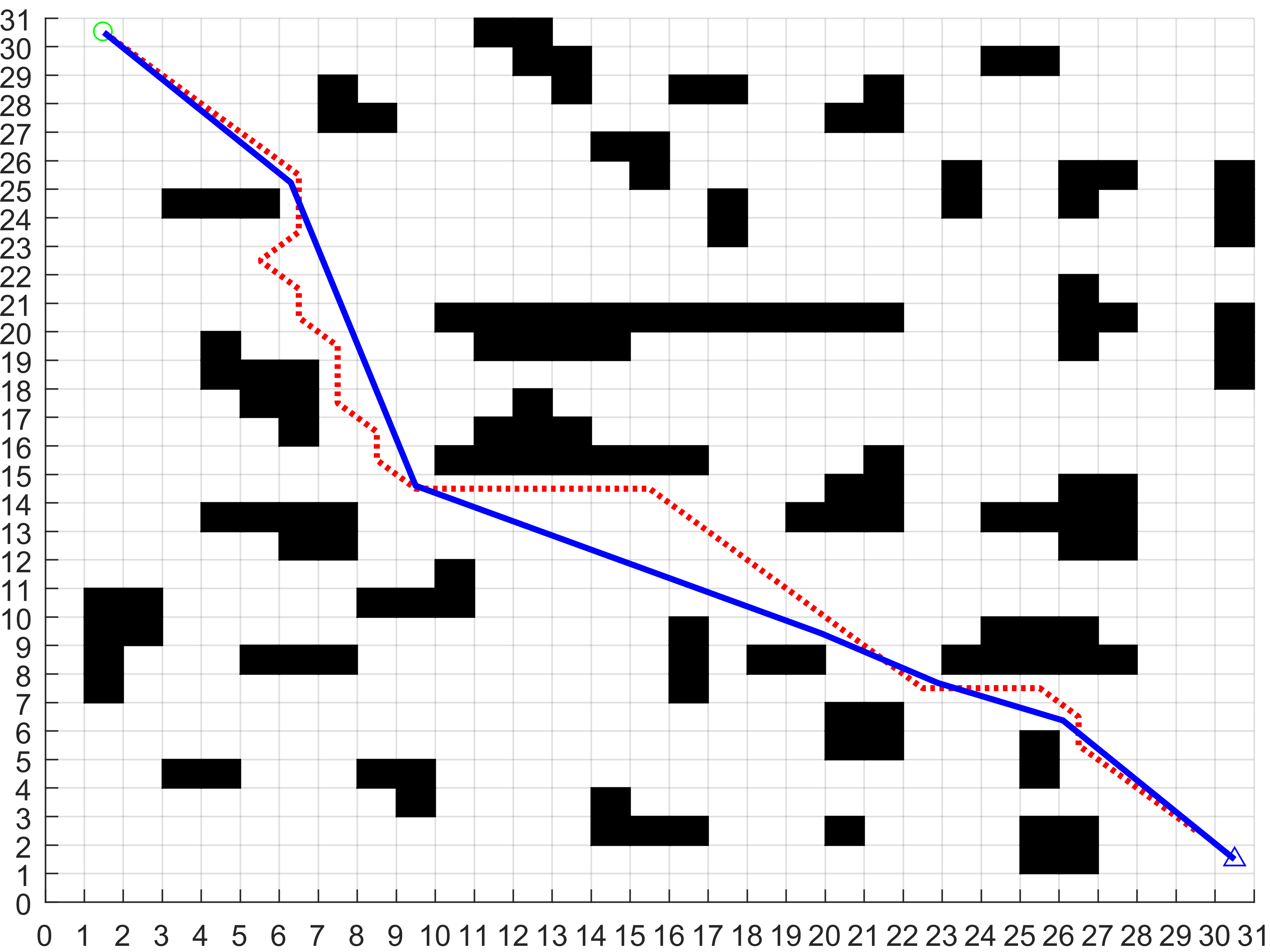
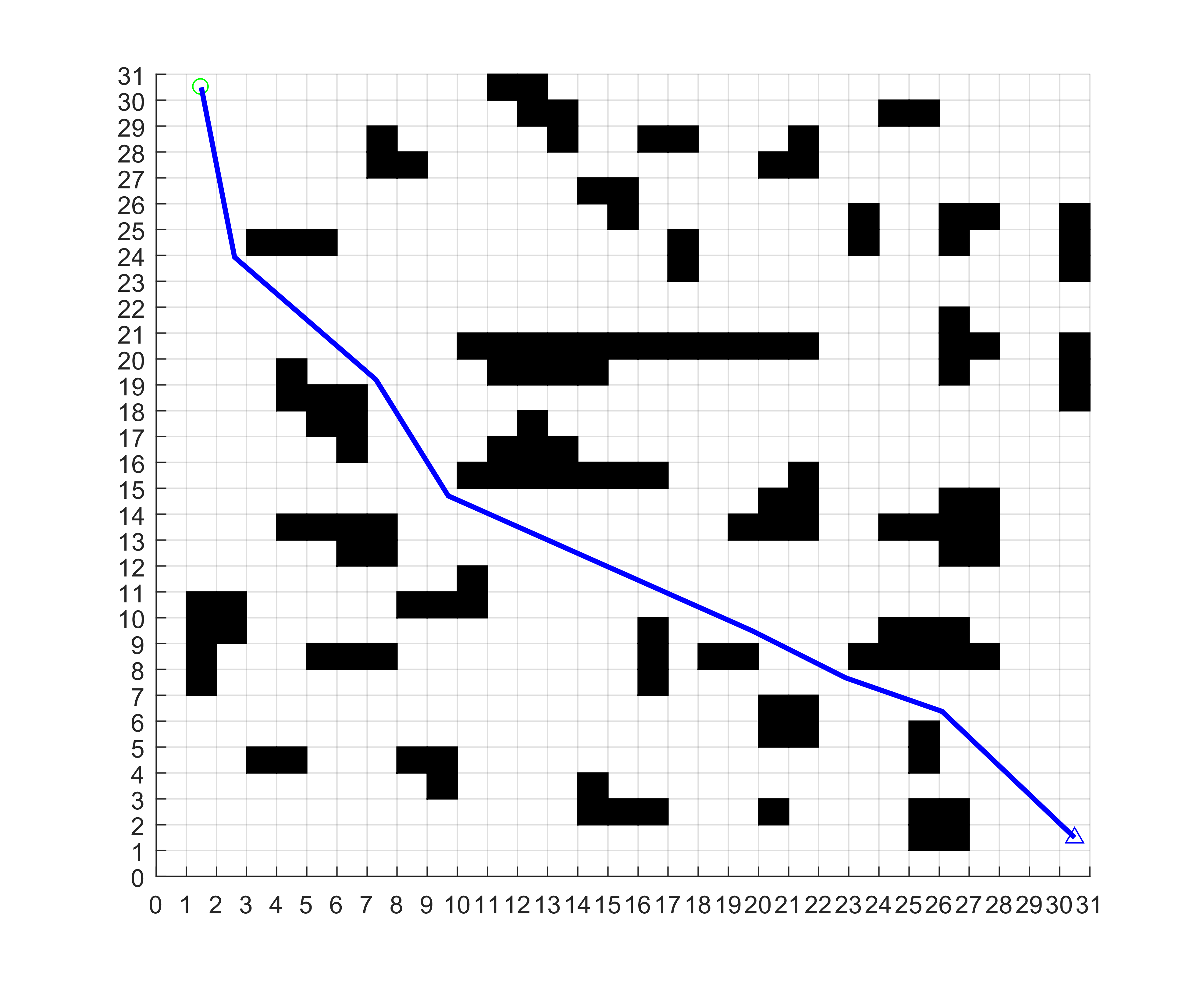
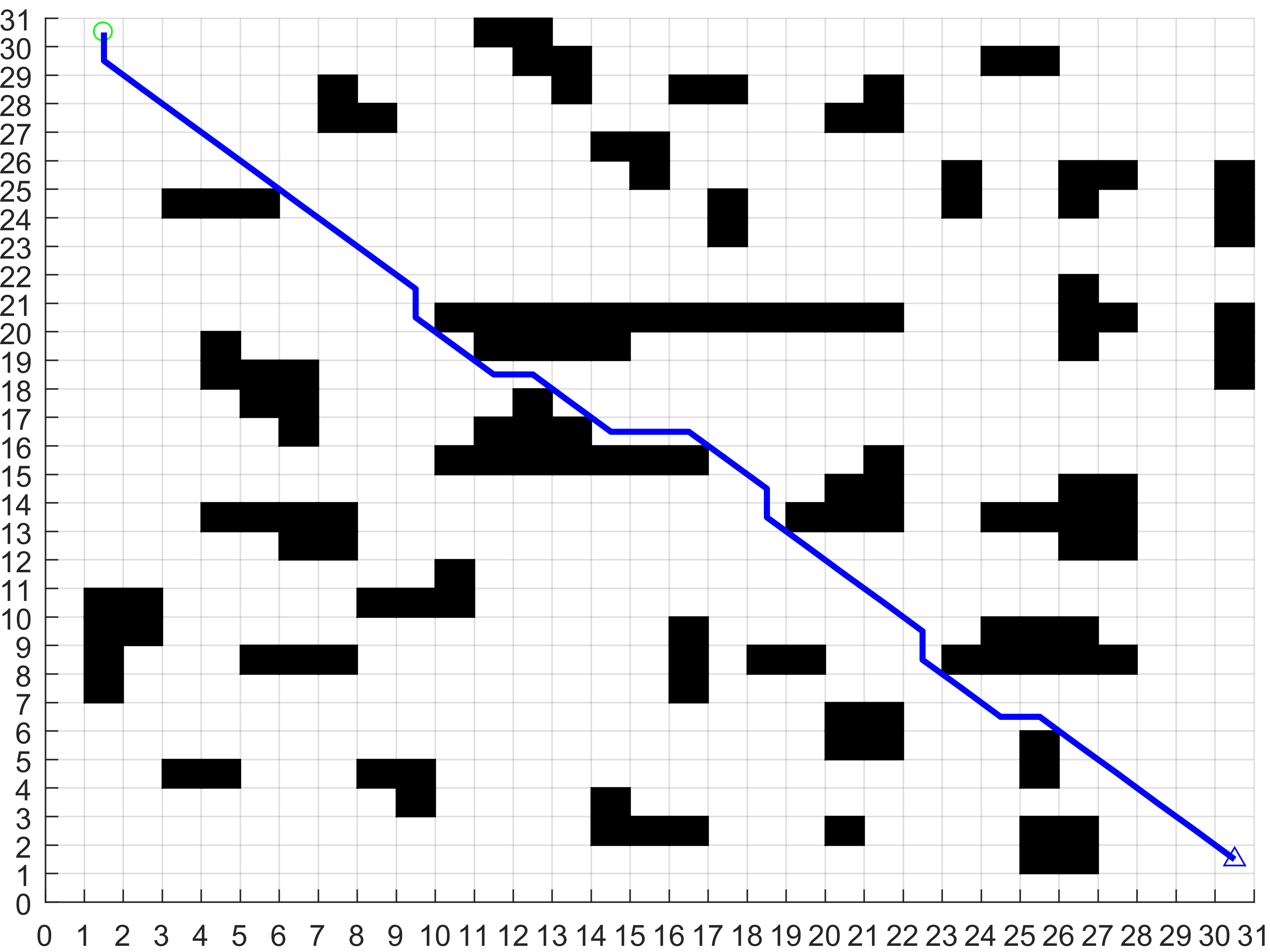
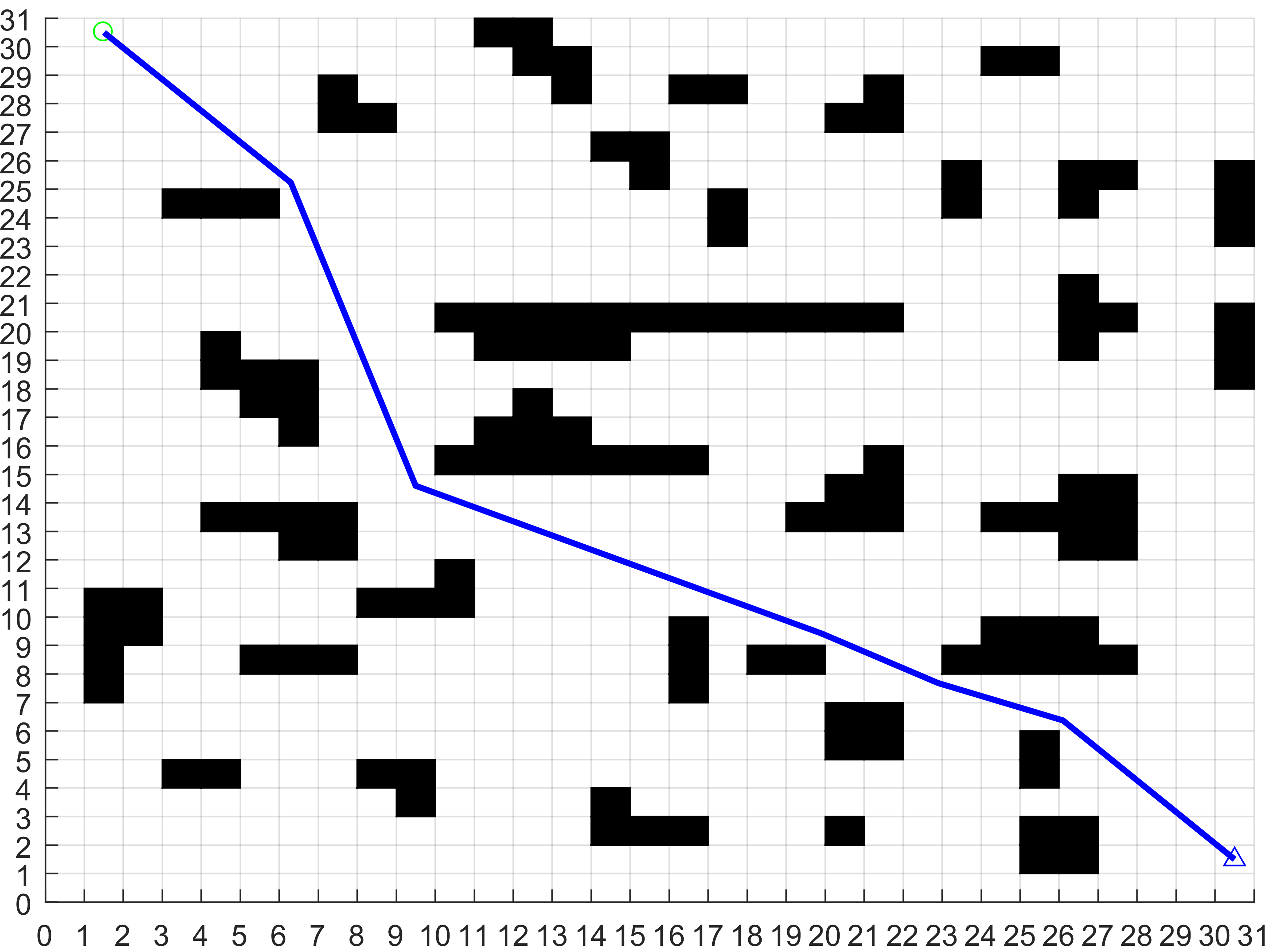
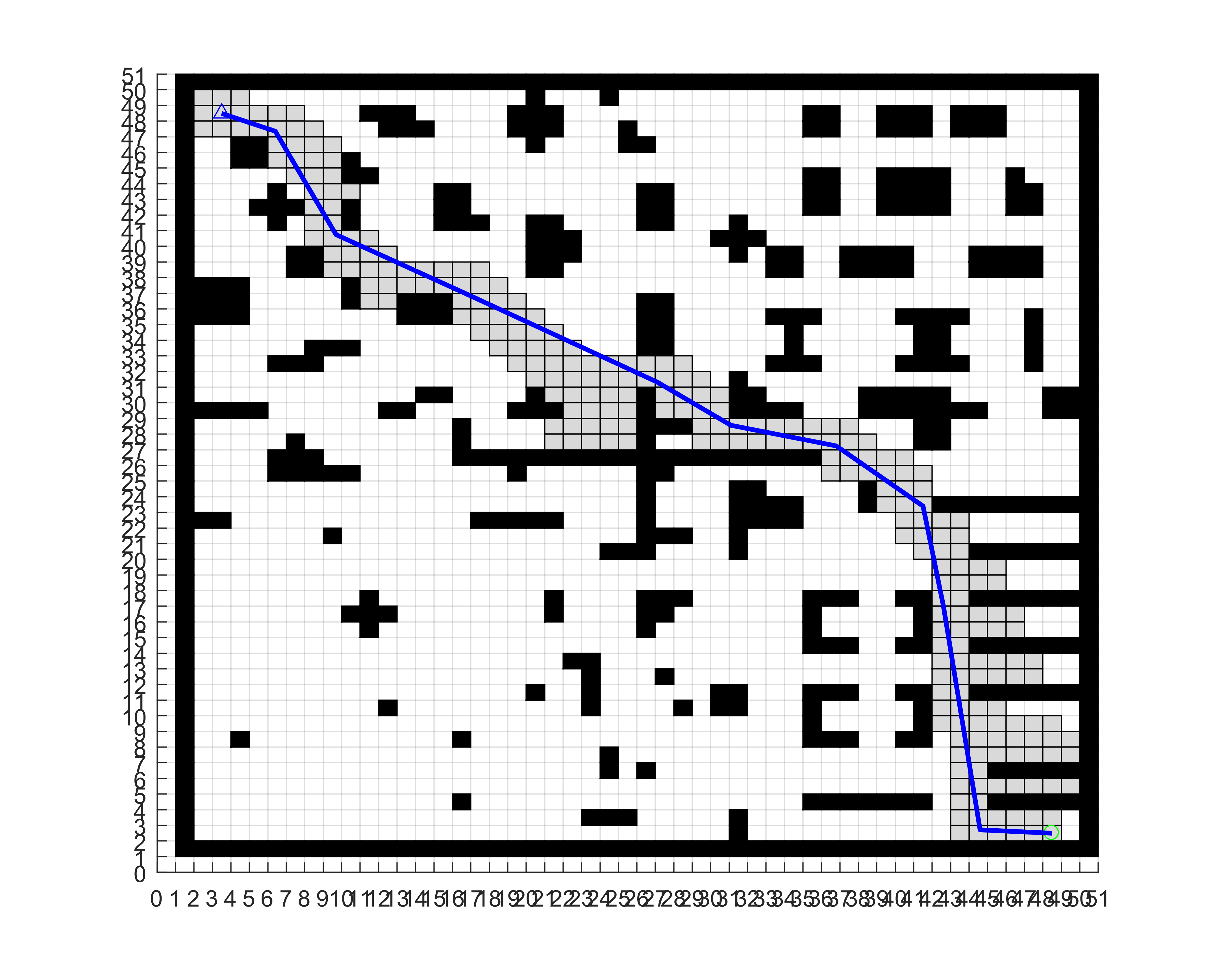
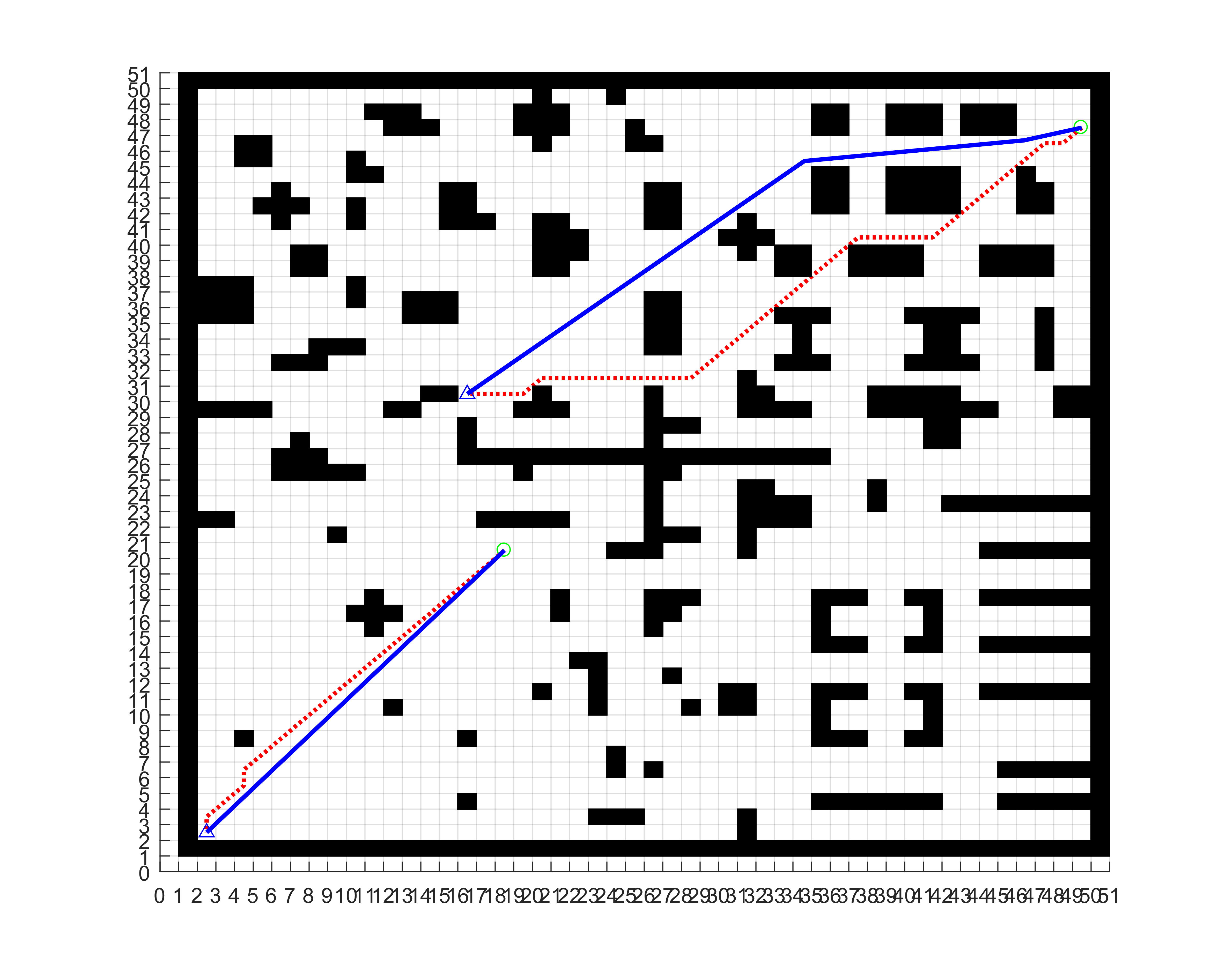
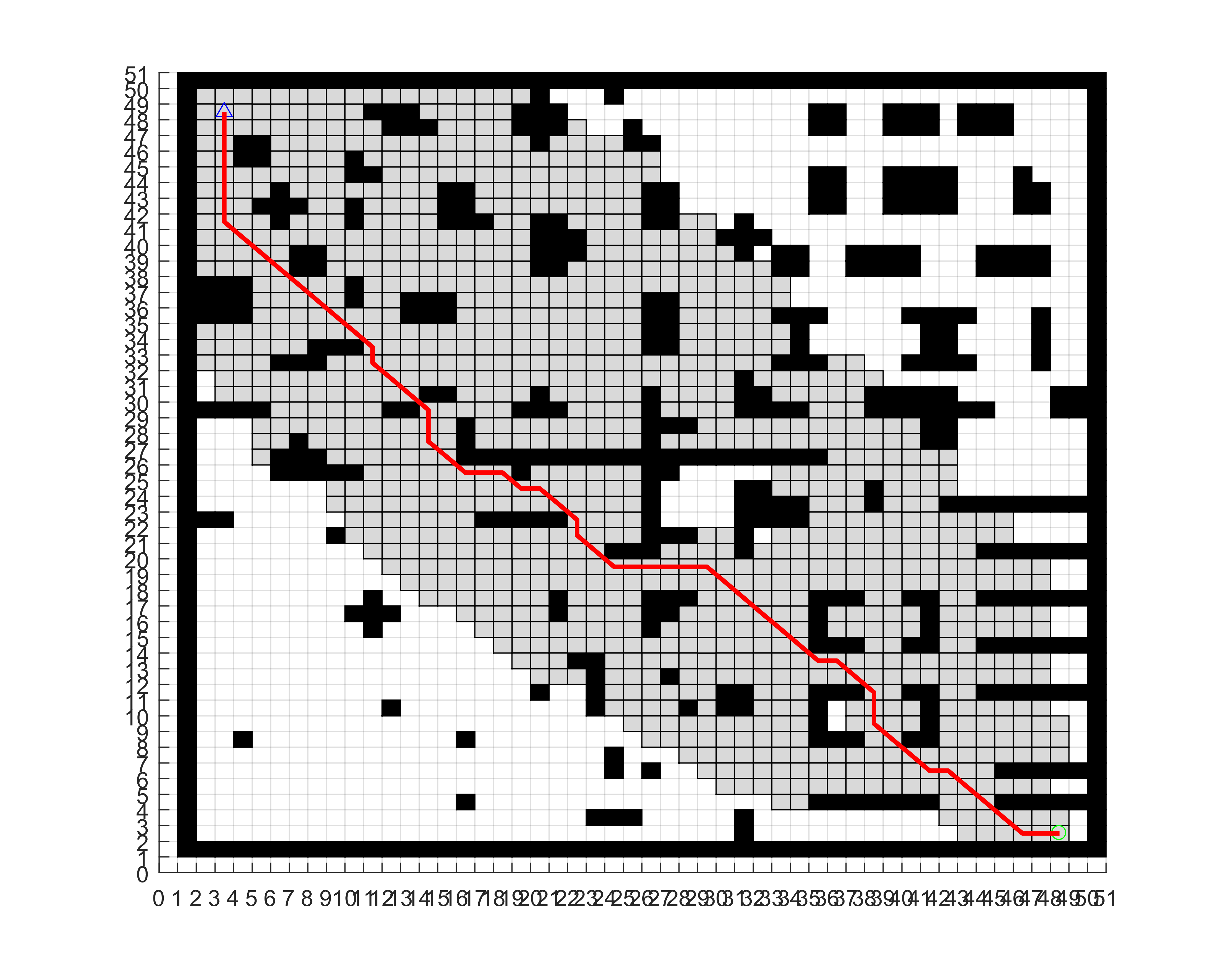
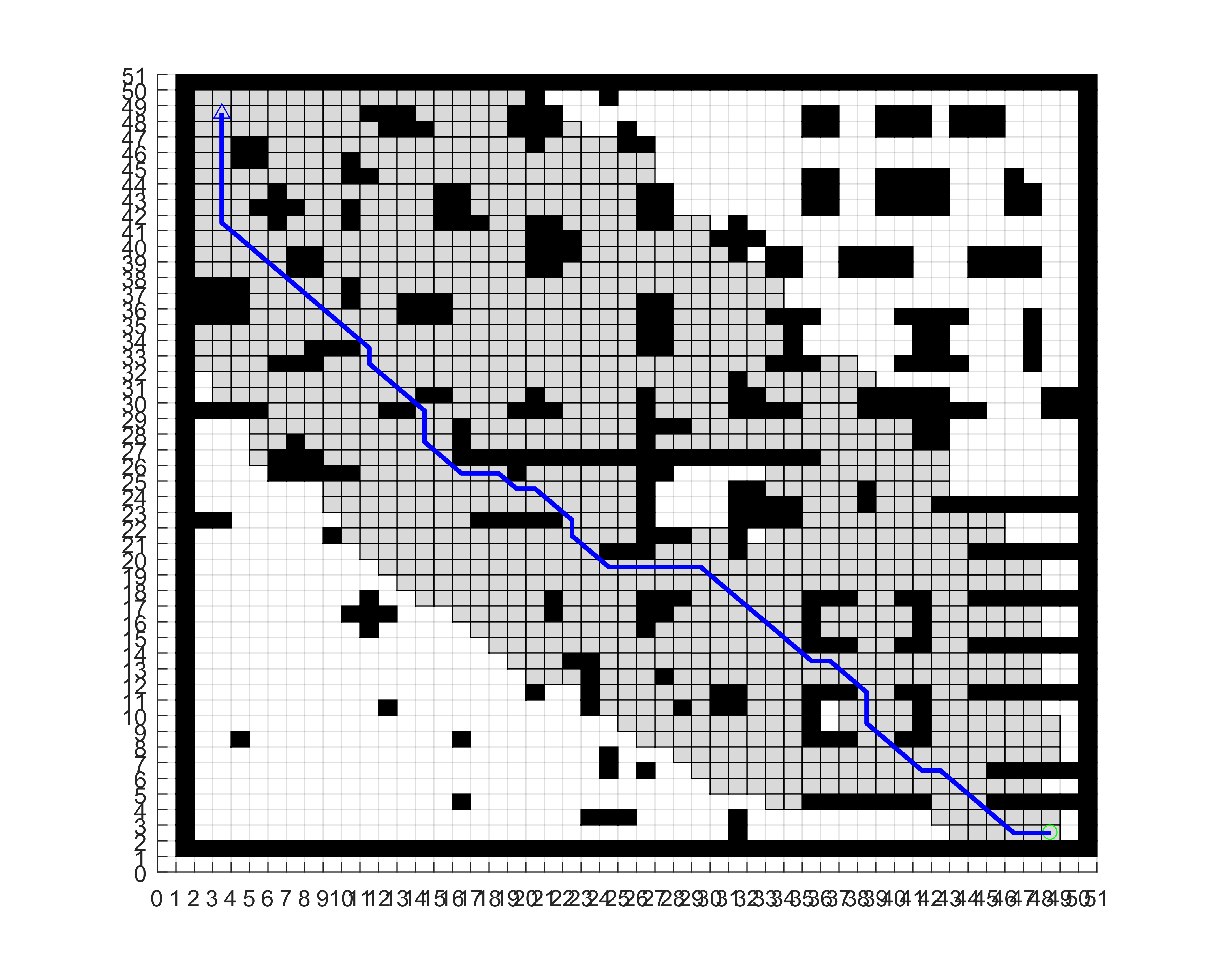
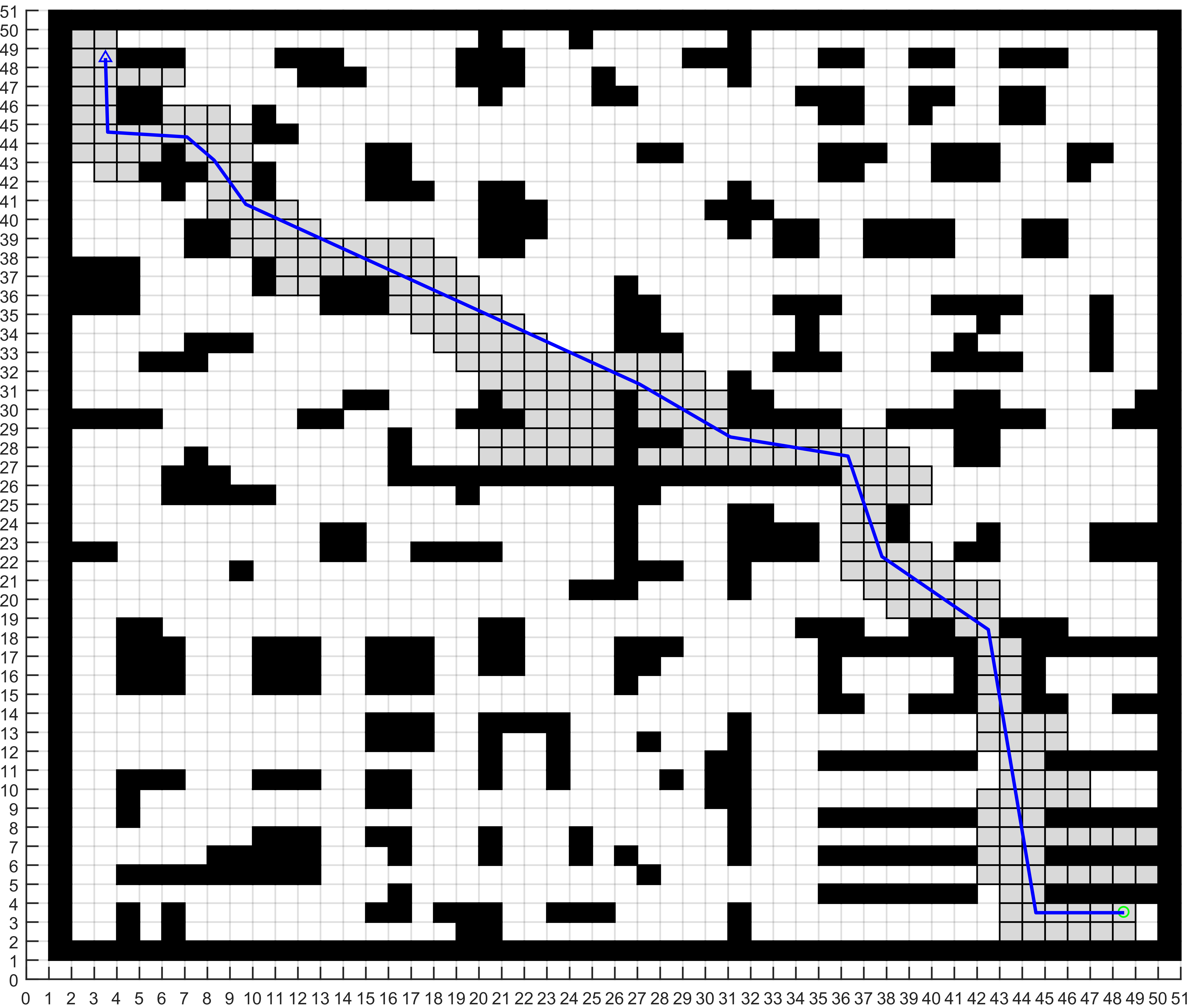
包含传统A*算法与改进A*算法性能对比?改进A*算法融合DWA算法规避未知障碍物仿真。
??算法经过创新改进(配有说明),两套代码就是一篇论文完整的实验逻辑,拿来直接使用,省心!
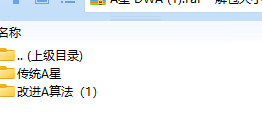
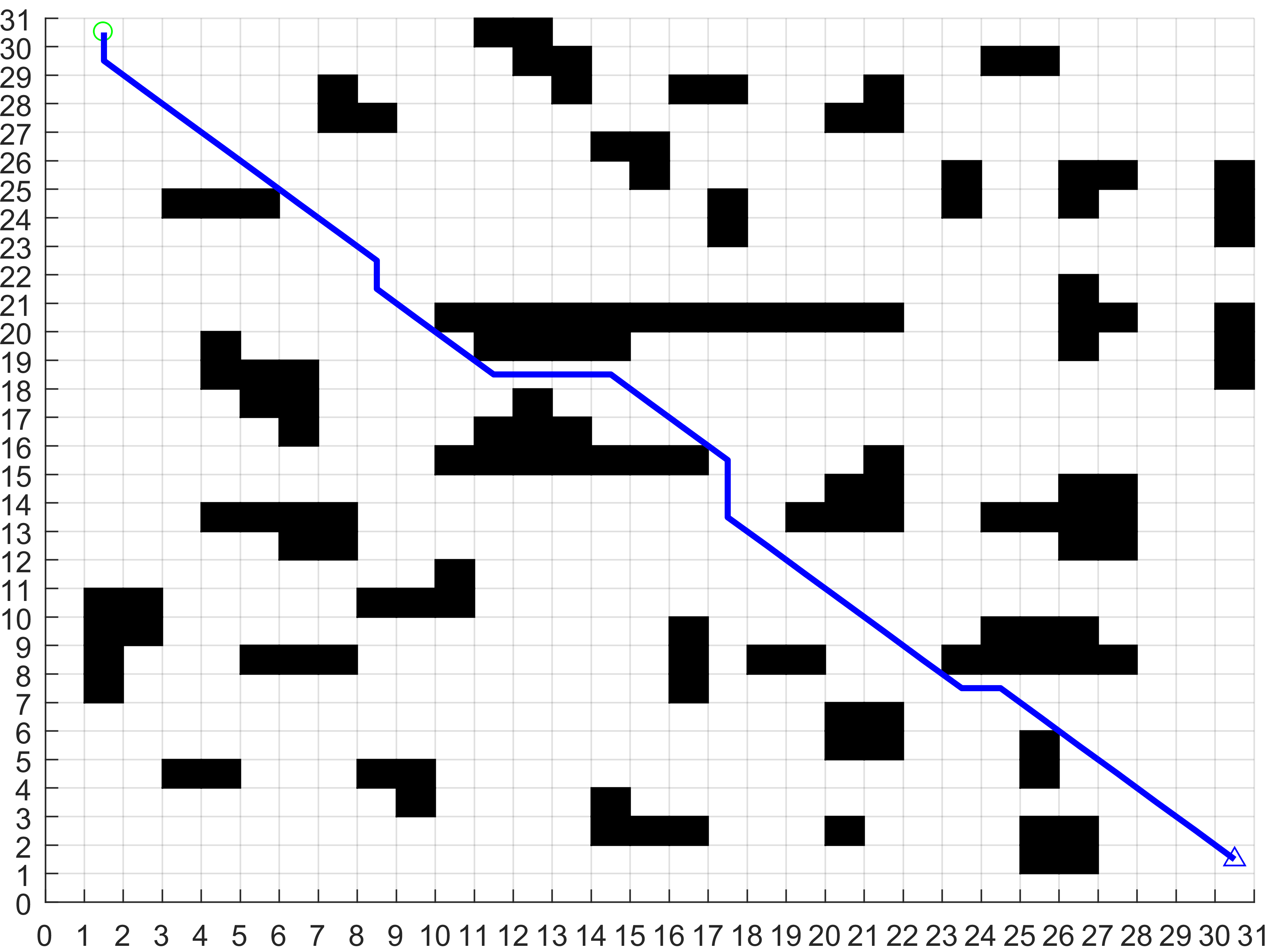
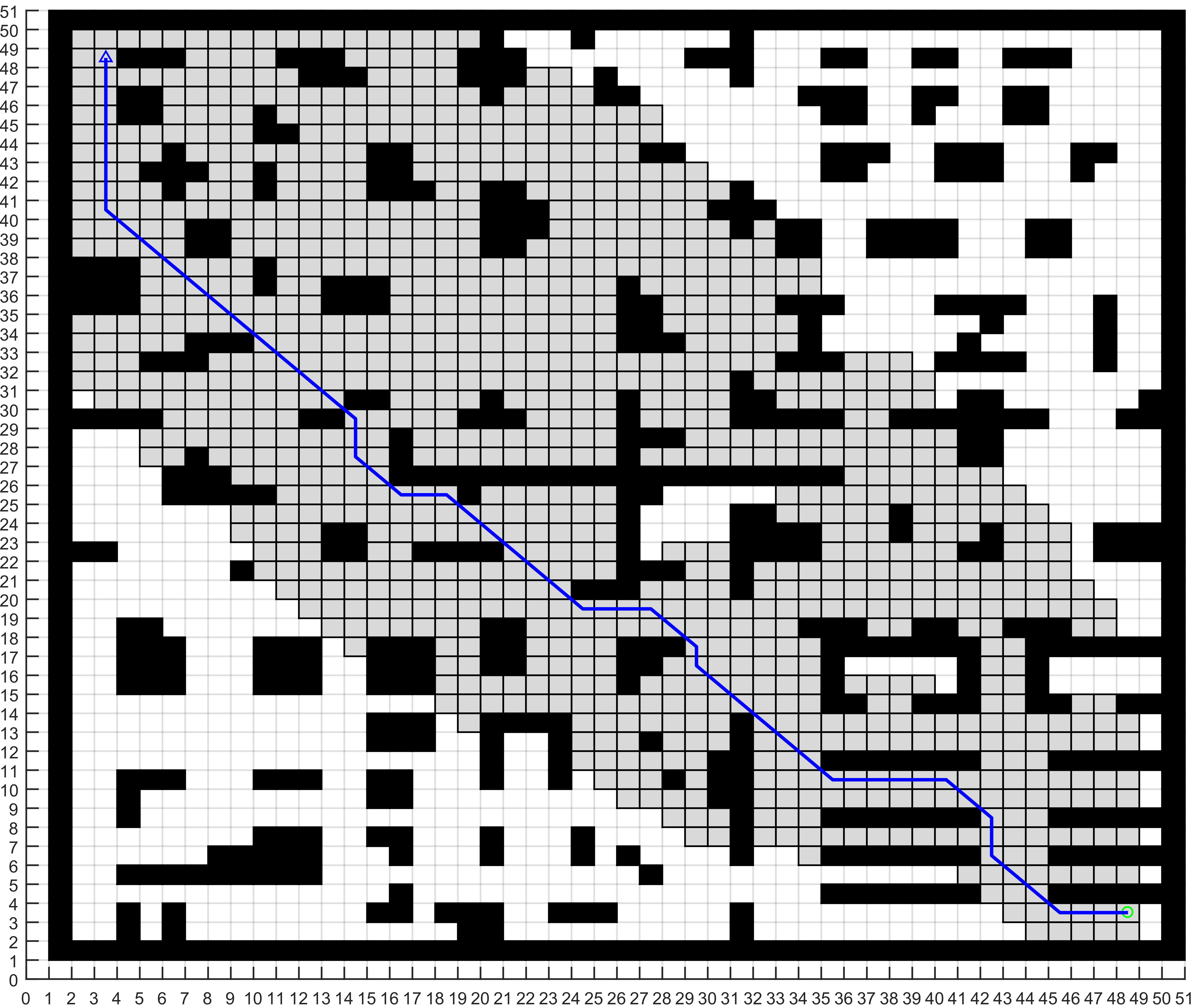
改进A*算法做全局路径规划,融合动态窗口算法DWA做局部路径规划既可规避动态障碍物,又可与障碍物保持一定距离。
任意设置起点与终点,未知动态障碍物与未知静态障碍物。
地图可更改,可自行设置多种尺寸地图进行对比,包含单个算法的仿真结果及角速度线速度姿态位角的变化曲线,仿真图片丰富
YID:3740751140814749 天狼星逃跑的分子
天狼星逃跑的分子